
INTRODUCTION
The loss of a body part has been witnessed from the beginning of the ages in humans, and this happens due to several reasons including diseases, accidents, and wars, and the cost of an artificial implant is very high at the moment for some members in the community. In injured patients, the lack of mobility for a long time can cause several medical and psychological issues. Patients around the world are now requiring implants that can last longer and provide less discomfort but at a reduced cost. The most comprehensive study found was the “Disability Survey 2017” report published by the General Authority for Statistics (GAStat) of Saudi Arabia in 2017. The GAStat surveyed a random sample of 33,575 households in a way that guarantees representation nationwide in 2017 to determine the demographics of people with physical and intellectual disability across Saudi Arabia [Putti, 1930; Miller, 1946; Engstrom and Van de Ven 1999; Ebnezar, 2000; Andrysek, 2010; May and Lockard 2011; Bindawas and Vennu, 2018]. According to the report, 1.6% of people in Saudi Arabia have extreme locomotor disability. Few studies have been published on the demographics of amputees in Saudi Arabia. Nowadays many artificial lower limbs are available on the market, and each one of them uses different mechanisms and materials, and the main factor between these artificial limbs is the mechanism of the knee joint, which are summarized in Table 1. Human movement is a biomechanically efficient process. A healthy person may travel vast distances while consuming little energy. Despite advancements in prosthetic design, replacing lower-limb segments with a prosthesis reduces mobility efficiency. The goal of a lower-limb prosthesis is to reduce the impact of the amputation and restore the patient’s independence. Hence, the prosthesis technology focuses on simulating the joint behavior of human lower limbs when walking. Therefore, understanding the gait cycle and the resulting mechanical forces that impact the whole cycle is crucial for designing exoskeletal devices. For people with transfemoral amputations, prosthetic knees are cutting-edge medical devices that use mechanical mechanisms and components to imitate the natural biological knee function [Preuss, 1911; American Academy of Orthopaedic Surgeons, 1960; Fliegel and Feuer, 1966; Padula and Friedmann, 1987; Hibbeler 1994; Shigley et al., 2004; Lambrecht 2008; Narang, 2013; Rodriguez-Merchan 2013; Bergmann et al., 2014; Kannenberg et al., 2014; Arelekatti, 2015; Pirker and Katzenschlager 2017]. By presenting a biomechanical overview of prosthetic knees, this article seeks to fill in this knowledge gap.
Summary of the different types of knee joints available on the market.
| Name | Specifications | Type | Cost |
|---|---|---|---|
LIMBS Knee [Narang 2013] | Four bar | $20 75 SR | |
The 802 Nylon Knee [Arelekatti 2015] | Single axis Hydraulic | $2100 7875 SR | |
C-leg [Kannenberg 2014] | Single axis Microprocessor hydraulic | $54,500 204,375 SR | |
Genium [Farina and Aszmann 2014] | Single axis Microprocessor hydraulic | $75,000 281,250 SR |
METHODS
This study presents an outlook on the designing of knee-related passive implants. The research methodology is subdivided into various categories. A schematic diagram explicitly indicating the outline of the sequence of steps that are followed for executing the present study is shown in Figure 1. In this paper, the salient results revealing the design of a knee implant according to durable biomechanical requirements are discussed. Furthermore, theoretical calculation encompassing the various structural components is also included. Also, we present ideas about three general trends in the current and future development of prosthetic knees in terms of the design project approach.

RESULTS AND DISCUSSION
Equilibrium analysis and theoretical design calculations
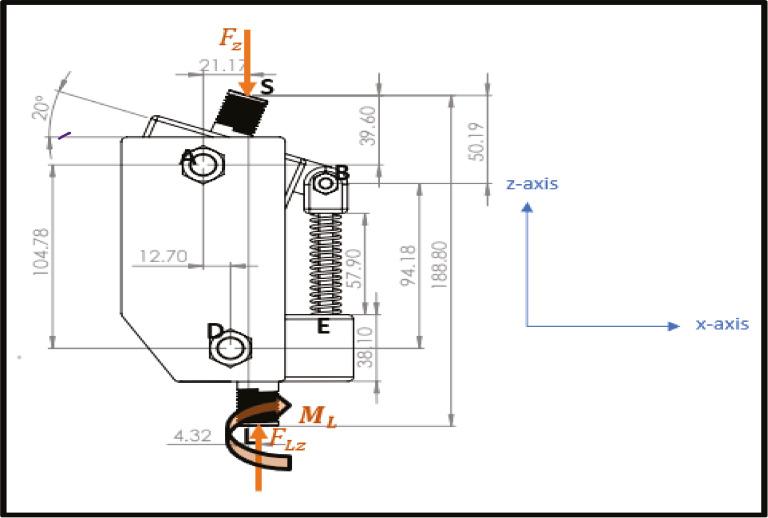
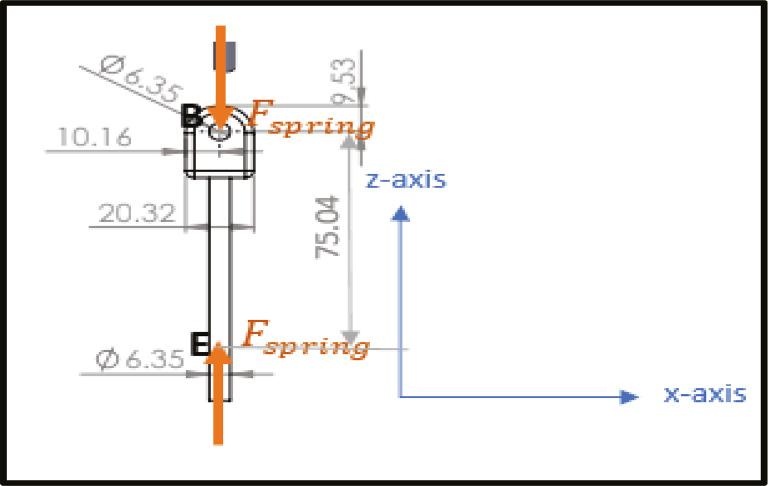
For our study, we defined the maximum body weight as 100 kg. From the literature it is known that the maximum force acting on the knee during walking (gait cycle 55%, knee flexion angle 20°) is around . This shows that the forces on the other direction are very small compared to the force on the z direction as summarized in Table 2. In order to find out the amount of forces acting on the device, we divided the external load by 2, one for each side of the knee, and the free body diagram (FBD) of each section is presented in Figures 2–6, respectively.
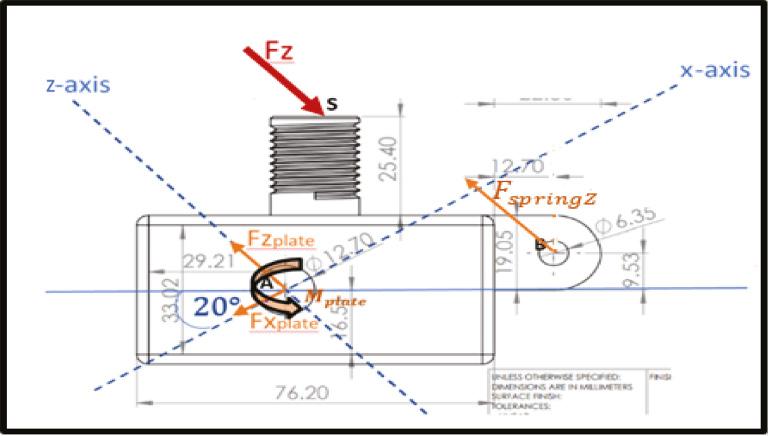
From FBD-1:
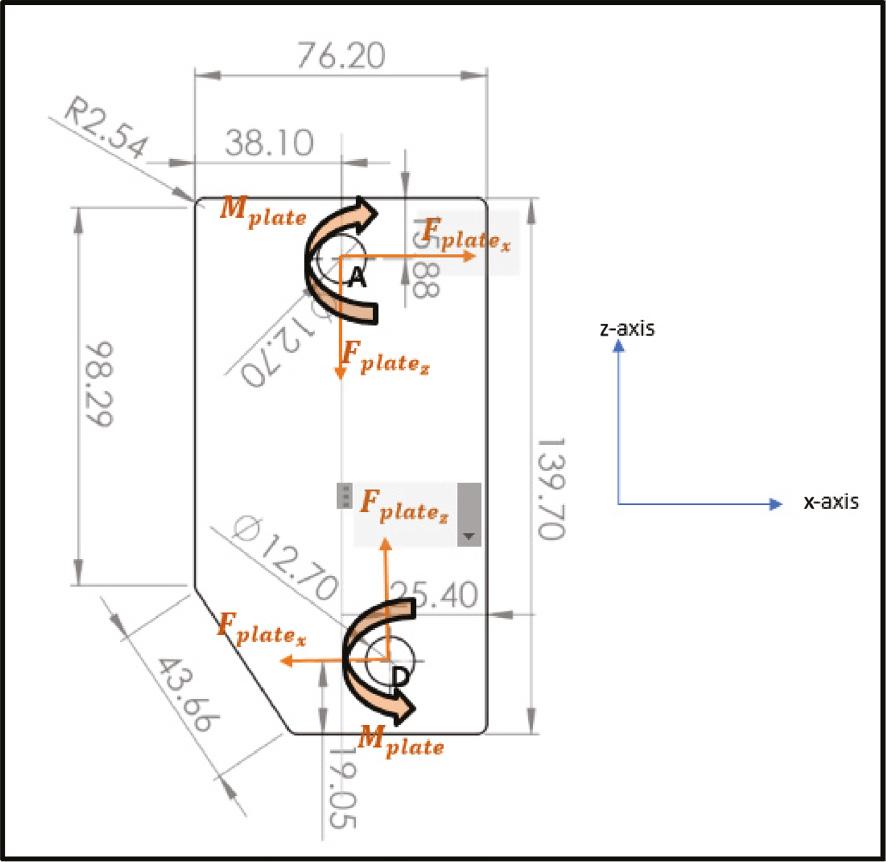
From FBD-2:
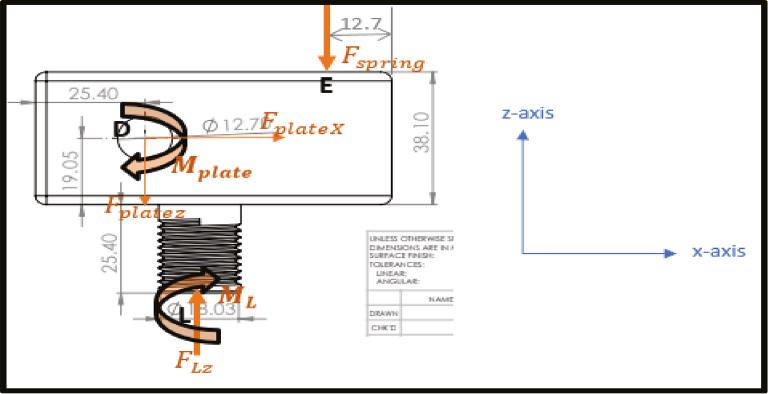
From FBD-3:
From FBD-4:
Summary of loads acting on knees and their equilibrium reactions.
| Type of load | Forces | Moments | |||||
|---|---|---|---|---|---|---|---|
| Unit | Newton | Newton-meter | |||||
| Name | Fz | FLZ | FplateX | Fplatez | FSpringZ | ML | Mplate |
| Value for one side | 1785.5 | 1785.5 | 0 | 1444 | 341.4 | 7.713 | 18.34 |
| Total value | 3571 | 3571 | 0 | 1444 | 682.8 | 15.426 | 18.34 |
Figures 7 and 8 summarize the force versus displacement and moment versus displacement charts, respectively.
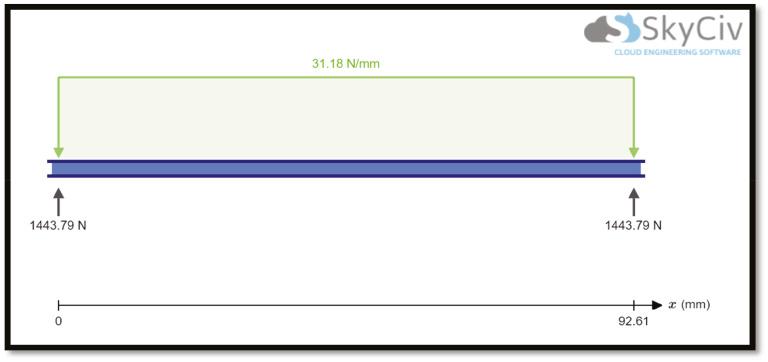
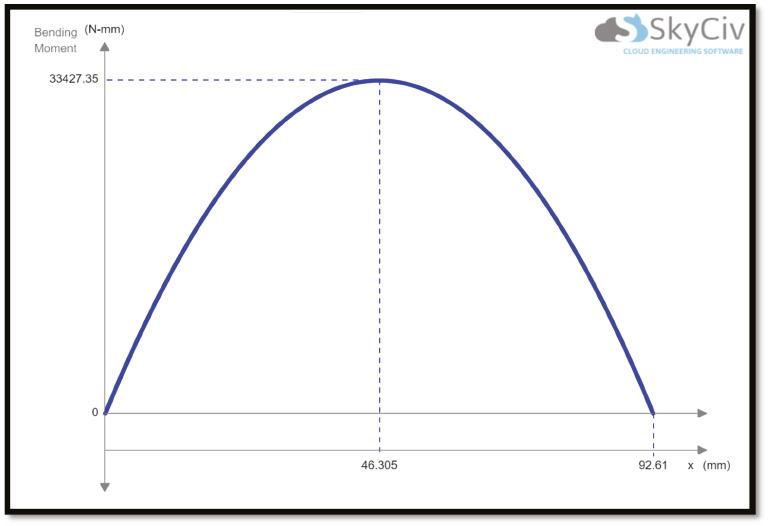
Here, at the middle of the bar, we will have the critical point:
From the literature it is known that the load fluctuates from nearly 0 N to a maximum of 3571 N; so, we assumed that the force is between 0 load and 3571 N (repeated stress) to continue further analysis.
For the bar material, we chose 1030 hot rolled steel, which has the following specifications [Ijaz et al., 2016]:
We have no change in cross sections; therefore, we assume that any stress concentration factor = 0.
Endurance limit Se calculations:
Stress calculations:
Endurance limit calculation for the rod used for constructing the leg
For the leg rod material, we chose Al-6061 rolled, which has the following specifications [Ijaz et al., 2016]:
We have no change in cross sections; therefore, we assume that any stress concentration factor = 0.
Endurance limit Se calculations:
For aluminum Al-T6061:
For the rod:
Effective length factor:
The moments of inertia for the leg:
The area of the cross section:
Buckling analysis of prosthetic pylon tubes
Buckling is considered as the common mode of failure in the prosthetic pylon tube materials such as aluminum Al-T6061 [27].
For the rod:
Effective length factor:
The moments of inertia for the leg:
The area of the cross section:
Euler’s formula:
Static analyses of helical spring design
In this section, we will cover the design approach for the helical spring; there is a systematic method of designing starting with the number of constraints:
The preferred range of the spring index is 4 ≤ C ≤ 12, with the lower indexes being more difficult to form (due to the risk of surface cracking) and springs with higher indexes tending to tangle often enough to require individual packing. This can be the first item for the design assessment. The recommended range of active turns is 3 ≤ N a ≤ 15. To maintain linearity, when a spring is about to close, it is necessary to avoid the gradual touching of coils (due to no perfect pitch). The rest of the constraints are stated below [Ijaz et al., 2016]:
Design assumptions
After a number of iterations, the best design dimensions are stated below:
After determining the primary dimensions, we performed the spring design calculations using the following equations:
A helical compression spring is made of no. 30 music wire.
Using these equations, we determined the important factors such as spring rate k, the maximum applicable force on the spring Fmax , maximum spring displacement, maximum sheer stress, and the static factor of safety (FOS) against failure.
INTEGRATION OF SOLIDWORKS SIMULATION AND CALCULATIONS
As we deduced from the calculation, the critical point will happen at gait cycle 55%, knee angle 20°, and . So, we studied this point in detail. The simulation results are summarized for each component and are shown in Figures 9–13, respectively.
![The figure shows the results of static simulation in solid works [3D solid modeling CAD software] for reaction forces and moments in the designed device.](/document_file/adfb3638-ff44-4b8e-bd9c-7dbf4c448ef6/ScienceOpen/image/jdr20230006_fig9.jpg)
![The figure shows the results of finite element mesh [3D solid modeling CAD software] for the designed device.](/document_file/adfb3638-ff44-4b8e-bd9c-7dbf4c448ef6/ScienceOpen/image/jdr20230006_fig10.jpg)
![The figure shows the displacement result on the designed device analyzed by the use of finite element [3D solid modeling CAD software].](/document_file/adfb3638-ff44-4b8e-bd9c-7dbf4c448ef6/ScienceOpen/image/jdr20230006_fig11.jpg)
![The figure shows the strain result on the designed device analyzed by the use of finite element [3D solid modeling CAD software].](/document_file/adfb3638-ff44-4b8e-bd9c-7dbf4c448ef6/ScienceOpen/image/jdr20230006_fig12.jpg)
![The figure shows the Von-Mises stresses result obtained on the designed device analyzed by the use of finite element [3D solid modeling CAD software].](/document_file/adfb3638-ff44-4b8e-bd9c-7dbf4c448ef6/ScienceOpen/image/jdr20230006_fig13.jpg)
Knee
So, the FOS of the spring [Shigley et al., 2004] is:
So, the FOS of the knee is:
The minimum FOS = 1.5 and it satisfies our specification.
Ansys analysis
Analysis for knee
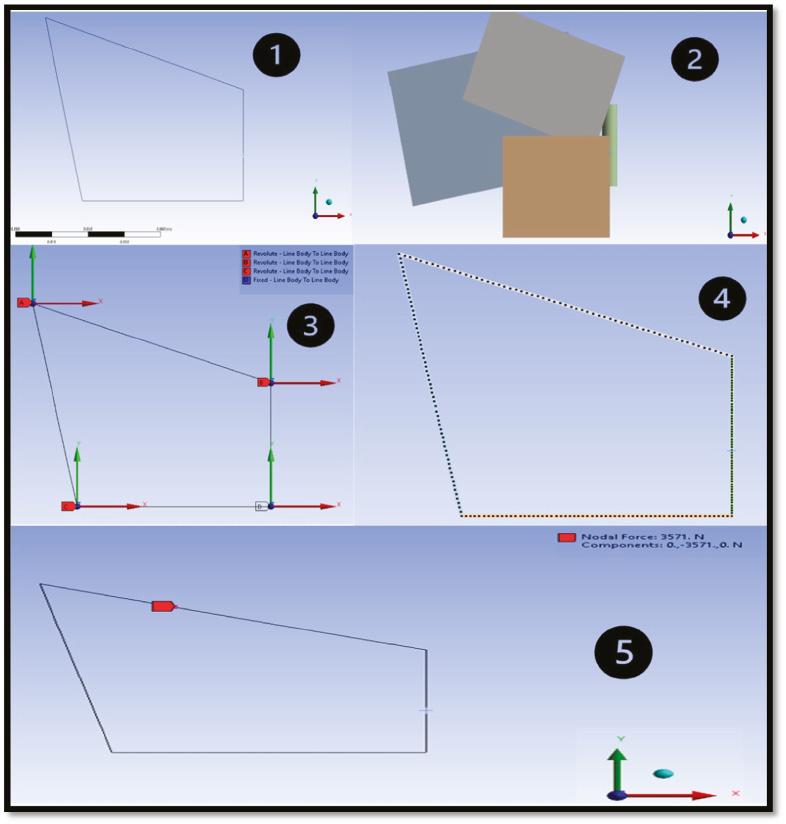
To study the knee joint in Ansys, we created a simplified two-dimensional (2D) geometry that considers the links between the parts with the cross-section area of each component.
Figure 14 presents the typical steps involved in Ansys simulations. Step (1) represents our geometry by simplifying the parts into 2D links. Step (2) represents the cross section of each part. Step (3) represents the connections between the links and which connection is fixed and which one is revolute. Step (4) represents the default mesh. Step (5) represents the external force acting on the upper connector of the knee.
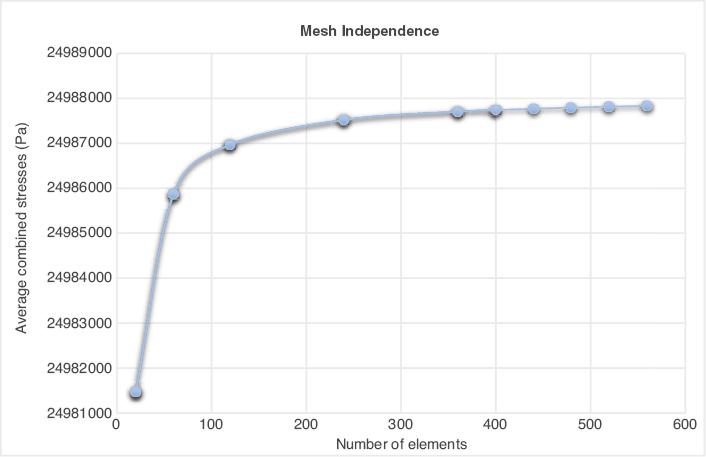
To obtain a reasonable result, we need to perform a mesh independence study to check if the results are independent of the mesh or not; this is done by running multiple simulations with different meshes and checking if the results change.
Figure 15 presents the average combined stress on the y-axis with increases in the number of elements on the x-axis. After 400 elements we can see that the line reaches an almost steady state, and changes in the output average combined stress become very small. Therefore, it is reasonable to take 480 elements.
So the FOS [Shigley et al., 2004] of the spring is:
which is pretty similar to the spring ns of the SOLIDWORKS (SW) and the theoretical part. And due to the simplification of the body, there was no stress concentration for the thread. Therefore, we are taking into account only the FOS of the spring for this Ansys module.
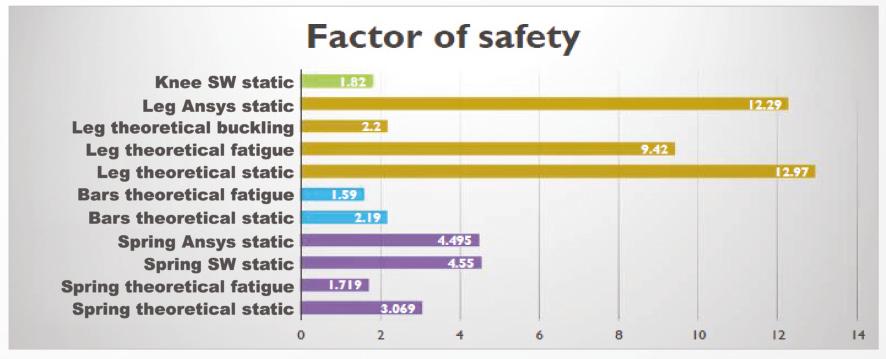
Validation of the factor of safety
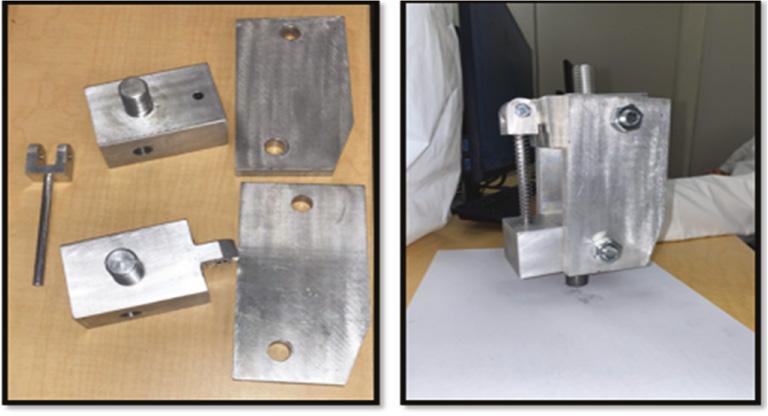
These static FOSs are high and we can change the material for the static load. But, changing it to a cheaper material would affect the fatigue FOS, which barely met our specification. As our goal was to use a material with high strength and high stiffness, this material is sufficient for our application. As the two bars have the same boundary conditions, external forces, geometries, and material, calculating one of them is enough. Both the FOSs are acceptable according to our constraints. As the FOS is too high for the static and the fatigue, our material has a specification that exceeds the requirement. Therefore, we can adjust the area, but the height must be the same due to two reasons. One is that the buckling FOS is 2 and it depends on the height. Therefore, changing the height may result in an FOS less than 1.5. The other reason is that the height of the leg depends on the human body dimensions. So, if we change it, there will be no balance and the user will fall. The summary of the FOS for each component of the implant is presented in Figure 16. The complete customized initial design is shown in Figures 17 and 18, respectively.

COST ANALYSIS
Material cost
The material cost of each part of the assembly as show in in figure as shown in Figures 17 and 18 respectively is estimated to be around 400 SR. The summary of the cost distribution for each component is presented in Table 3. The Al alloy or Ti-based alloys could be promising candidates for the manufacturing of these kind of devices [Ijaz et al., 2022, 2014, 2016, 2017; Ijaz and Hashmi 2022; Héraud et al., 2023].








CONCLUSION
In the present study, we concluded that our preliminary design could assist in solving problems that our community is facing in terms of the higher cost of artificial implants such as artificial limbs. We tried investigating the reason for the higher cost while looking at the existing products on the market, and we figured out that most of the products were designed using chips and microprocessors, which are good but they simultaneously increase the cost. To conclude, a summary of the present study is as follows:
We decided to design and fabricate an indigenous cost-effective artificial lower limb, following some constraints and criteria and the weight and rate methodology.
We started our project by following the selection methodology until we came up with our final knee joint design which includes a single axis with a spring connecting to a leg rod.
Using our knowledge from mechanical engineering, vital mathematical calculations were made to validate the FOS for our designed product.
Ansys analysis and SW simulation were utilized to quantify the FOS and make sure it is higher than that we initially considered in the constraints. We proved that from all the methods our device is safe and the FOS is more than 1.5.
After finalizing the design, we started choosing the material for the different parts of our product. As this designed knee implant will be in contact with the human body, we made sure that the material is biocompatible. Thus, we chose aluminum Al-6061 for the other parts of the knee joint and the leg rod.