- Record: found
- Abstract: found
- Article: found
Unpredictability of escape trajectory explains predator evasion ability and microhabitat preference of desert rodents
Read this article at
Abstract
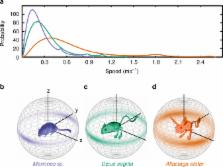
Mechanistically linking movement behaviors and ecology is key to understanding the adaptive evolution of locomotion. Predator evasion, a behavior that enhances fitness, may depend upon short bursts or complex patterns of locomotion. However, such movements are poorly characterized by existing biomechanical metrics. We present methods based on the entropy measure of randomness from Information Theory to quantitatively characterize the unpredictability of non-steady-state locomotion. We then apply the method by examining sympatric rodent species whose escape trajectories differ in dimensionality. Unlike the speed-regulated gait use of cursorial animals to enhance locomotor economy, bipedal jerboa (family Dipodidae) gait transitions likely enhance maneuverability. In field-based observations, jerboa trajectories are significantly less predictable than those of quadrupedal rodents, likely increasing predator evasion ability. Consistent with this hypothesis, jerboas exhibit lower anxiety in open fields than quadrupedal rodents, a behavior that varies inversely with predator evasion ability. Our unpredictability metric expands the scope of quantitative biomechanical studies to include non-steady-state locomotion in a variety of evolutionary and ecologically significant contexts.
Abstract
Biomechanical understanding of animal gait and maneuverability has primarily been limited to species with more predictable, steady-state movement patterns. Here, the authors develop a method to quantify movement predictability, and apply the method to study escape-related movement in several species of desert rodents.
Related collections
Most cited references61
- Record: found
- Abstract: not found
- Article: not found
A Mathematical Theory of Communication
- Record: found
- Abstract: not found
- Article: not found
Mechanisms of Maintenance of Species Diversity
- Record: found
- Abstract: not found
- Article: not found